Das automatisierte Fahren verändert nicht nur den Antrieb, sondern vor allem die Verantwortung im Fahrzeug. Entscheidend ist, wann ein System nur unterstützt, wann es die Fahraufgabe zeitweise übernimmt und unter welchen Bedingungen es wirklich ohne menschliches Eingreifen fahren darf. Genau darum geht es hier: um die Technik dahinter, die Sicherheitslogik und den aktuellen Stand in Deutschland.
Die wichtigsten Punkte auf einen Blick
- Assistenz ist nicht Autonomie: Bei Level 1 und 2 bleibt der Mensch dauerhaft verantwortlich.
- Level 3 ist ein klarer Sprung: Das System fährt in bestimmten Situationen selbst, der Fahrer muss aber übernahmebereit bleiben.
- Level 4 funktioniert nur im definierten Betriebsbereich: Dort kann das Fahrzeug auch ohne Eingriff weiterfahren oder sicher stoppen.
- Deutschland ist rechtlich weit, praktisch aber selektiv: Der Einsatz ist möglich, aber an Betrieb, Route und Genehmigung gebunden.
- Die eigentliche Sicherheitsfrage ist die Rückfallebene: Sensorik, Software, Redundanz und Cybersecurity entscheiden über Reife, nicht das Marketing.
- Im Alltag setzen sich zuerst begrenzte Einsatzfälle durch: Autobahn, Shuttle-Routen, Parkfunktionen und Logistik sind realistischer als das voll autonome Privatauto auf jeder Straße.
Wie sich die Automatisierungsstufen im Alltag unterscheiden
Ich trenne bei Fahrfunktionen immer drei Dinge: Assistenz, teilautomatisierte Fahrt und autonomen Betrieb. Der Unterschied klingt klein, ist technisch und rechtlich aber entscheidend. Bei Assistenzsystemen hilft das Fahrzeug, die eigentliche Fahraufgabe bleibt jedoch beim Menschen. Sobald das System selbst lenkt, bremst oder beschleunigt, verschiebt sich die Verantwortung nur dann, wenn der jeweilige Automatisierungsgrad das ausdrücklich vorsieht.
| Level | Was das System übernimmt | Rolle des Menschen | Typischer Nutzen |
|---|---|---|---|
| 1 und 2 | Einzelne Funktionen wie Spurhalten oder Abstand | Dauern aufmerksam bleiben und jederzeit eingreifen | Weniger Stress auf Autobahn und im Stau |
| 3 | Die Fahraufgabe in klar definierten Situationen | Übernahmebereitschaft nach Aufforderung | Entlastung in monotonen Fahrsituationen |
| 4 | Die Fahrt im festgelegten Betriebsbereich ohne Eingriff des Menschen | Passagierrolle, Eingriff nicht erforderlich | Shuttles, Logistik, begrenzte Stadt- oder Campusverkehre |
| 5 | Fahren überall, wo auch ein Mensch fahren könnte | Keine Fahraufgabe mehr | Derzeit kein regulärer Alltagseinsatz im öffentlichen Straßenverkehr |
Der Begriff Operational Design Domain, kurz ODD, ist dabei zentral. Gemeint ist der exakt definierte Rahmen, in dem ein System sicher arbeiten darf, also zum Beispiel bestimmte Straßen, Geschwindigkeiten, Wetterlagen und Verkehrssituationen. Ohne diese Begrenzung ist jedes Versprechen nur halb so viel wert. Wer diese Unterschiede im Kopf behält, versteht auch besser, warum Deutschland bei Genehmigungen so genau auf den Betriebsbereich schaut.
Wo Deutschland 2026 rechtlich und praktisch steht
Stand 2026 ist Deutschland bei automatisierten Fahrfunktionen rechtlich weiter als viele andere Märkte, im Straßenalltag aber noch klar begrenzt. Für hochautomatisierte Systeme ist die entscheidende Frage nicht, ob sie theoretisch fahren können, sondern wo sie das dürfen und unter welchen Bedingungen der Betrieb freigegeben ist. Der aktuelle Rechtsrahmen erlaubt genau diese Trennung zwischen dem allgemeinen Straßenverkehr und festgelegten Betriebsbereichen.
Für die Praxis heißt das: Level 3 kann in eng umrissenen Situationen zulässig sein, wenn der Fahrer die Kontrolle bei Aufforderung unverzüglich wieder übernehmen muss. Level 4 geht weiter, weil das System in einem klar definierten Gebiet die Fahraufgabe selbst übernimmt und der Mensch nicht als ständig verfügbare Reserve im Fahrersitz eingeplant ist. Das ist kein Detail, sondern der Kern der Sicherheitsarchitektur.
- Level 3 ist vor allem eine Entlastung in definierten Szenarien, etwa bei zähfließendem Verkehr oder auf geeigneten Autobahnabschnitten.
- Level 4 ist eher ein Betriebsmodell für Shuttle-Routen, Campusverkehre, Parkfunktionen oder Logistikachsen.
- Unbegrenztes Fahren auf jeder Straße ist damit nicht gemeint, auch wenn der Begriff in der Kommunikation oft zu groß wirkt.
Für Genehmigungen und Prüfungen ist in Deutschland die technische Nachweisbarkeit wichtig, nicht nur die Funktionsdemo. Das heißt: Betriebsbereich, Sicherheit, Rückfallebene und Verantwortlichkeiten müssen sauber beschrieben sein. Genau deshalb ist die nächste Frage nicht nur juristisch, sondern vor allem technisch: Was muss ein solches System leisten, damit es sicher genug ist?

Welche Technik und Sicherheitsarchitektur ein gutes System braucht
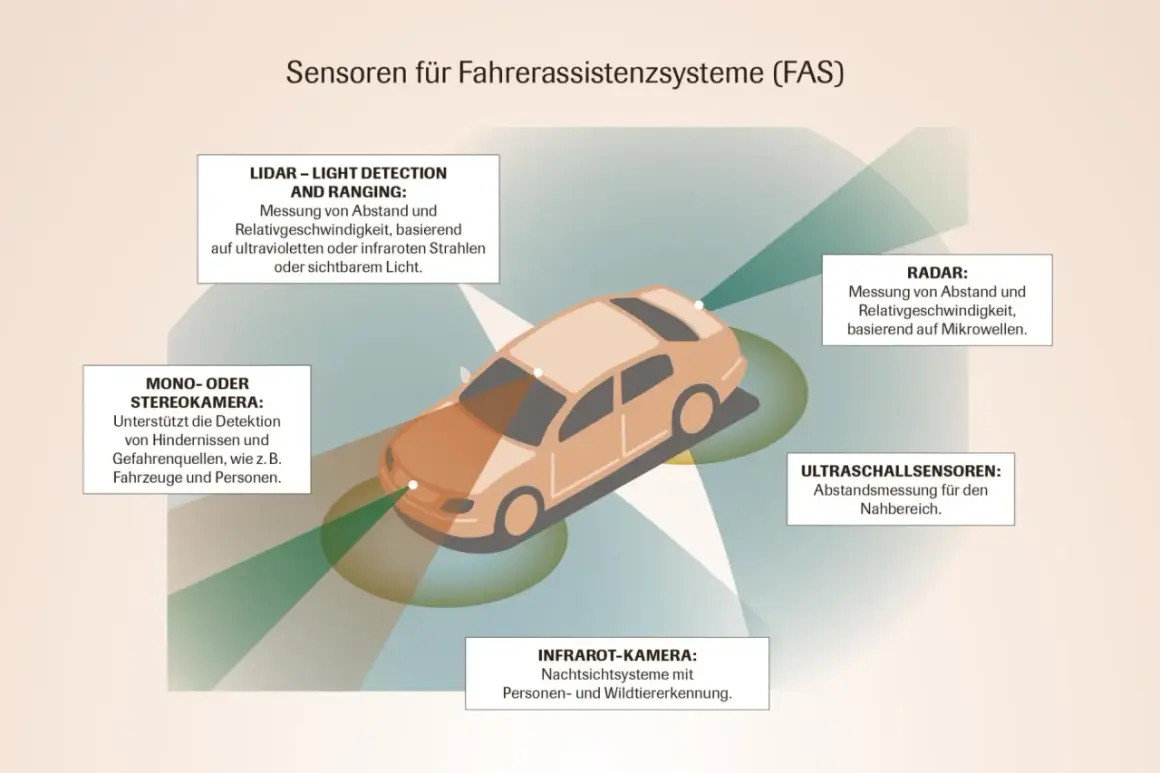
Ein robustes System lebt nicht von einem einzelnen Sensor, sondern von Sensorfusion. Kamera, Radar und oft auch Lidar liefern unterschiedliche Blickwinkel auf dieselbe Situation. Die Kamera erkennt Markierungen und Ampeln gut, Radar ist stark bei Abstand und Geschwindigkeit, Lidar hilft bei der präzisen Umfeldmodellierung. Erst das Zusammenspiel macht die Umgebung verlässlich genug, um daraus Fahrentscheidungen abzuleiten.
Mindestens genauso wichtig ist Redundanz. Wenn ein Teil der Kette ausfällt, darf nicht sofort die gesamte Fahraufgabe kippen. Redundanz betrifft deshalb nicht nur Sensoren, sondern auch Lenkung, Bremsen, Stromversorgung und Rechenleistung. In der Praxis spricht man dann von einem System, das bei einem Fehler nicht einfach abstürzt, sondern in einen sicheren Zustand übergeht.
- Sensorik: Kamera, Radar und gegebenenfalls Lidar liefern Daten über Straße, Fahrzeuge, Fußgänger und Verkehrszeichen.
- Lokalisierung: Das Fahrzeug muss sehr genau wissen, wo es sich befindet, oft über Karten, GNSS und eigene Umfelddaten.
- Redundante Steuerung: Lenkung, Bremse und Recheneinheit brauchen Ausweichpfade.
- Minimal-Risk-Maneuver: So nennt man die abgesicherte Reaktion, wenn das System nicht weiterfahren kann, meist ein kontrolliertes Ausrollen oder ein sicherer Halt.
- Software-Updates: Ohne kontrollierte Updates bleibt die Sicherheitslogik schnell hinter der Realität zurück.
- Cybersicherheit: Vernetzte Fahrzeuge sind Angriffsflächen und müssen gegen unbefugten Zugriff geschützt sein.
Ich halte Cybersicherheit für einen der am meisten unterschätzten Punkte. Ein System kann sensorisch sehr stark sein und trotzdem verwundbar bleiben, wenn Schnittstellen, Cloud-Anbindung oder Funkverbindungen schlecht abgesichert sind. Die Bundesregierung nennt Cybersicherheit und Datenschutz deshalb ausdrücklich als Daueraufgabe beim autonomen und vernetzten Fahren. Für mich ist das logisch: Je mehr das Fahrzeug Daten austauscht, desto wichtiger wird der Schutz dieser Daten und der technischen Schnittstellen.
Ein weiterer Begriff, den man kennen sollte, ist Privacy-by-Design. Gemeint ist, dass Datenschutz nicht nachträglich ergänzt wird, sondern in Architektur und Software mitgedacht ist. Das ist nicht nur eine juristische Frage, sondern auch eine Vertrauensfrage. Wer ein Fahrzeug akzeptieren soll, das selbst fährt, erwartet zu Recht, dass es nicht gleichzeitig unnötig viele sensible Daten sammelt oder unkontrolliert weitergibt. Genau hier trennt sich die echte Sicherheitsarchitektur von einem bloßen Showeffekt.
In welchen Situationen die Systeme stark sind und wo sie an Grenzen stoßen
Die besten Anwendungsfälle sind fast immer die, in denen die Umgebung kontrollierbar ist. Deshalb funktioniert automatisierte Fahrt besonders gut dort, wo die Dynamik überschaubar ist und das System auf wiederkehrende Muster trainiert werden kann. Ich sehe das vor allem in vier Bereichen: Autobahn, Shuttle-Routen, Parkhäuser und logistische Korridore.
| Einsatzszenario | Warum es gut funktioniert | Typische Grenze |
|---|---|---|
| Stau und Autobahn | Klare Fahrspur, wiederkehrende Bewegung, wenig komplexe Interaktion | Baustellen, Sperrungen, extreme Witterung |
| Shuttle auf fester Route | Geofenced Betrieb mit bekannten Haltepunkten | Unvorhersehbare Ereignisse außerhalb des Betriebsbereichs |
| Parkhaus und Valet Parking | Langsame Geschwindigkeit, definierte Umgebung, wenig Konflikte | Unklare Markierungen, Fußgänger, enge Umbauten |
| Logistik zwischen Knotenpunkten | Wiederkehrende Strecken, planbare Übergaben, gute Flottensteuerung | Gemischter Verkehr, Wetterwechsel, Baustellen |
Die Schwachstellen liegen fast immer in denselben Situationen: schlechtes Wetter, Schneematsch, Blendung, fehlende Markierungen, ungewöhnliche Baustellenführung, unklare Vorfahrtslagen oder spontane menschliche Entscheidungen. Genau dort reicht ein sauberer Algorithmus allein nicht aus, weil die Realität nicht standardisiert ist. Wer mit solchen Systemen arbeitet, muss deshalb immer fragen: Was passiert im Ausnahmefall?
Eine weitere Grenze ist die kommunikative Unsicherheit im Mischverkehr. Menschen blinken nicht immer früh genug, Radfahrer weichen spontan aus, Fußgänger verhalten sich situativ, nicht regelhaft. Das automatisierte Fahrzeug muss diese Unsicherheit nicht nur erkennen, sondern auch in eine sichere Fahrstrategie übersetzen. Je komplexer die Umgebung, desto schwerer wird genau das.
Deshalb sind die spannendsten Anwendungen oft nicht die spektakulärsten. Ein Shuttle auf einer festen Strecke ist technisch oft sinnvoller als ein angeblich universell fahrendes Fahrzeug, das in der Praxis an Baustellen oder Markierungsfehlern scheitert. Aus dieser Logik ergeben sich die Kriterien, die ich bei der Auswahl anlegen würde.
Worauf ich bei Fahrzeugen, Flotten und Projekten achten würde
Wenn ich ein Fahrzeug, eine Flotte oder ein Projekt bewerte, schaue ich nie zuerst auf die Werbeaussage. Ich frage immer nach dem Betriebsbereich, nach der Rückfallebene und nach der Frage, wie transparent der Hersteller mit Grenzen umgeht. Ein System, das viel kann, aber seine Grenzen verschweigt, ist für mich nicht reif genug.
- Ist der Betriebsbereich klar beschrieben? Route, Straße, Geschwindigkeit, Wetter und Tageszeit müssen benannt sein.
- Wie läuft die Übergabe an den Menschen? Der Fahrer braucht eine eindeutige, frühe und verständliche Aufforderung.
- Welche Ausfälle sind abgesichert? Sensorverlust, Stromprobleme, Rechenfehler und Verbindungsabbrüche dürfen nicht offen bleiben.
- Wie wird softwareseitig aktualisiert? Ohne belastbaren Update-Prozess verliert das System schnell an Sicherheit.
- Welche Daten werden gesammelt? Für Fahrfunktion, Diagnose und Datenschutz braucht es eine klare Trennung.
- Gibt es reale Betriebserfahrung? Testfahrten sind wichtig, aber echte Dauerbetriebe sagen mehr über Reife und Robustheit aus.
Für Flottenbetreiber und Kommunen kommt noch ein zweiter Punkt hinzu: Das System muss organisatorisch passen. Ein Shuttle ist nicht nur ein Fahrzeug, sondern Teil eines Betriebs mit Reinigung, Wartung, Monitoring, Entstörung und Verantwortlichkeiten. Wer diese Ebenen mitdenkt, reduziert das Risiko deutlich. Wer nur das Fahrzeug bestellt, hat oft noch kein betriebssicheres Gesamtsystem.
Ich würde deshalb immer auch nach dem Umgang mit Störungen fragen. Wie reagiert das Fahrzeug bei gesperrter Fahrbahn, ungültiger Markierung oder schlechter Sicht? Wie schnell wird ein Fallback ausgelöst? Wer wird informiert? Genau an diesen Stellen zeigt sich, ob ein Projekt nur technisch beeindruckt oder auch im Alltag stabil läuft. Und genau dort entscheidet sich, ob automatisierte Mobilität mehr ist als ein Pilot mit guten Bildern.
Warum der nächste Schritt nicht im Privatwagen beginnt
Wenn ich auf die Entwicklung in Deutschland blicke, erwarte ich den größten Fortschritt nicht im frei fahrenden Privat-Pkw, sondern in klar umrissenen Einsatzräumen. Dort sind Nutzen, Sicherheit und Betrieb viel besser kontrollierbar. Shuttle-Verkehre, Parkfunktionen, Autobahnassistenten, Logistikachsen und Campuslösungen werden deshalb zuerst wachsen.
Das ist auch aus Sicherheitsgründen sinnvoll. Je klarer die Umgebung, desto leichter lässt sich das Verhalten des Systems prüfen, verbessern und rechtlich absichern. Gleichzeitig darf man den Komfortgewinn nicht mit Vollautomatisierung verwechseln. Weniger Stress auf der Autobahn ist ein echter Vorteil, aber kein Freifahrtschein für jede Verkehrssituation.
Für mich ist der wichtigste Blickwinkel deshalb dieser: Gutes automatisiertes Fahren ist nicht das lauteste, sondern das sauber begrenzte System. Wer Technik, Betriebsbereich und Sicherheitsarchitektur zusammen denkt, erkennt sehr schnell, welche Lösungen reif sind und welche noch zu viel versprechen. Genau diese Nüchternheit wird die nächste Mobilitätsphase prägen.